在风力发电系统中,使用伺服技术调节风机叶片的桨距角,也就是我们常听到的“伺服变桨”,已经是目前行业内一种非常普遍的做法了。

PicSource:KEBA+LTI
那么,在风电变桨应用中的伺服会有怎样的特别之处呢?本期,就和大伙简单聊聊这个话题。
PicSource:KEBA+LTI | Pitch Control System
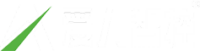
首先,既然风电变桨是在调节风机叶片的桨距角,那么,伺服在变桨应用中所起到的作用,就和它在很多其他行业一样,也是为动态、精准的位置控制提供有效的动力输出。相应的,其在系统架构中所处的位置,自然也就是属于面向应用对象实体的传动设备层级,上位与控制器相联,输入侧接动力电源,输出侧通过交流伺服电机来驱动桨叶的旋转。
⚠️ 桨距角:Pitch Angle,指风机桨叶与旋转平面之间的夹角

PicSource:KEBA+LTI
不过,考虑到变桨系统自身所处的严苛、恶劣的应用环境,及其复杂、特殊的运行工况,它所使用的伺服与一般自动化系统中的伺服产品相比,还是有诸多方面的不同之处的。
先说应用环境。
我们知道,风力发电机组通常都是运行在偏远开阔的平原、高原、沿海和近海大陆架上的,这些地方极为复杂严苛的地理气候条件,如:高海拔、多风沙、高温、低温、高湿度、盐雾、腐蚀…等等,都是风电变桨系统中的伺服产品必须先要克服和适应的。尤其是较大的环境湿度和昼夜温差,可能使桨叶在表面上产生凝露,它们会随着风轮的转动倒灌到叶根和轮毂里面,再加上轮毂内电气柜上凝结的露水,和轮毂旋转需要使用的润滑油剂,这些都会对其中的伺服产品造成侵蚀和污染。

PicSource:KEBA+LTI | DriveStar
因此,风电变桨系统中使用的伺服,无论是驱动还是电机,它们都需要具备适应极端恶劣工作环境的能力,例如:
-
运行环境温度可低至 -30°C、高温至 +60°C 甚至更高;
-
能够在海拔高达 3000 甚至 4000 米的工作环境中运行(需适当降容使用);
-
可抵御盐、雾、清洁剂、液压油、润滑剂…等污染物的侵蚀;
-
防护等级较低( IP20 )的伺服驱动器可采用冷板穿墙的方式进行安装,以便在对其进行密闭(无风扇)封装保护时,兼顾冷却散热特性;
-
…
PicSource:KEBA LTI
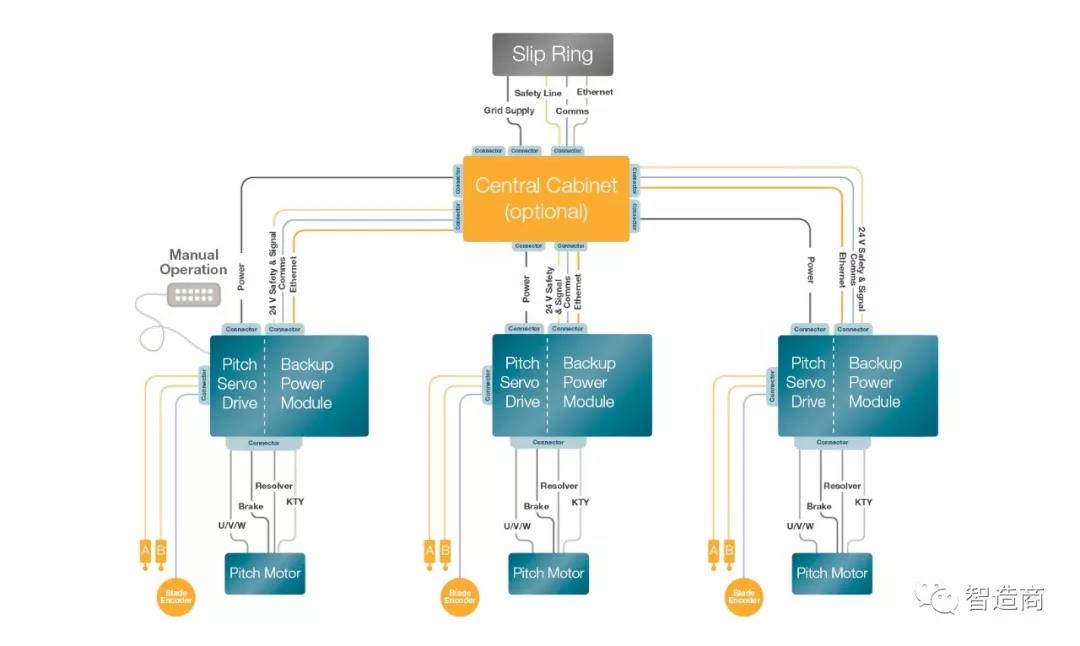
变桨应用另一个重要的环境特点,就是其各类机电组件都是安装在几十米高的轮毂内的,且在工作时需要和风轮一同旋转。一般来说,轮毂会以每分钟十几转的速度转动,加上风机塔筒受到的风力气流影响产生的震动,这要求变桨系统能够在一个持续振动的工作环境中长期保持稳定的运行状态。因此,应用于风电变桨的伺服产品,包括:驱动器、电机、线缆、连接器…等等,都需要具备较一般自动化产品更强的耐振抗冲击性能。目前应用于风电变桨领域的伺服电机,普遍都集成重载连接器,并且大部分都还在使用分辨率较低的旋变 Resolver 作为反馈,也就是因为这个道理。

PicSource:KEBA LTI
再来看运行工况。
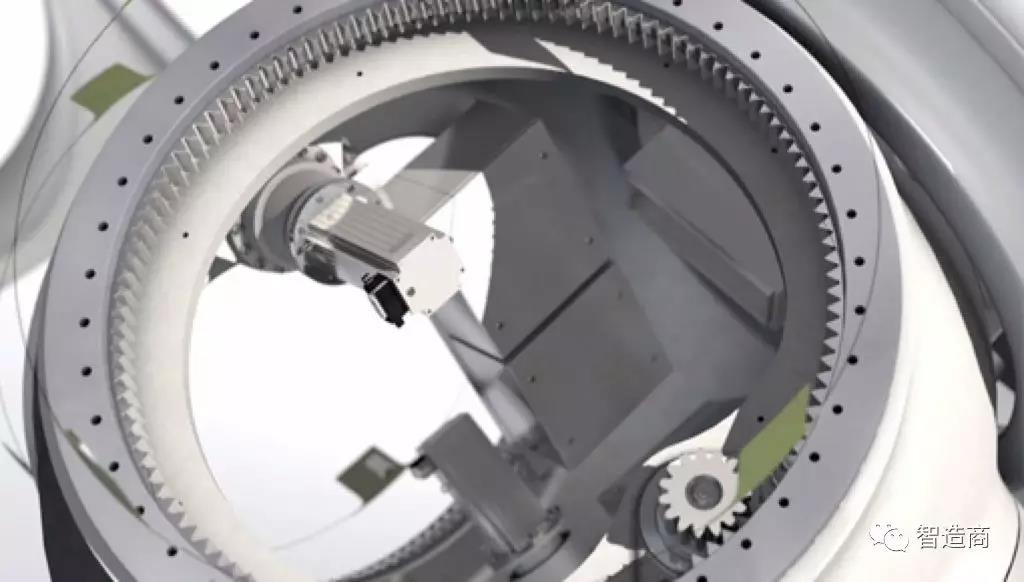
风电变桨的目的,是为了根据风速的变化调节风力气流对桨叶的攻角,从而让风轮能够持续获得稳定的气动转矩和功率;而在风力较大时,它需要起到限制叶片力矩、减少发电机出力乃至制动刹车的作用。从某种意义上说,变桨机构其实是风电系统的一个安全装置。因此,变桨应用中使用的伺服系统必须具备实时、安全、可靠…等这几个方面的特性。
PicSource:KEBA+LTI
所谓实时,是指伺服系统驱动风机叶片旋转的变桨动作,必须基于每次风速的改变而立即作出的,并且是动态连续不停顿的,这与一般自动化设备中有规律的周期性运动是不同的。风机运转时,其叶片桨距角的范围一般在 0 ~ 90°,考虑到叶片在各角度位置所受到的风阻大小的差异,伺服系统需根据从主机接收到的桨距角目标指令,结合当前所在的位置,计算出变桨动作所需的速度曲线,并以此为依据完成对风叶角度的调节。

PicSource:KEBA+LTI | PITCHmaster
变桨动作时,三个叶片须始终保持同步,之间的角度误差一般应在 2° 以内,这通常是由变桨控制器与驱动器之间的通讯总线和位置反馈编码器来提供保障的。
通讯方面,目测 CAN 总线是现在风电变桨行业的一大主流;

KEBA+LTI | PITCHmaster II
而在桨距角位置测量上,考虑到伺服电机与轮毂内齿之间几百甚至上千的减速比,光依赖电机内部的伺服反馈往往是不够准确的,伺服厂家通常会为用户配备第二编码器输入端口,用于直接读取风叶的桨距角反馈。
不过,风电机组的运转并不总是一帆风顺的,它有可能会受到来自风力过大、发电机异常、备用电源故障… 等各类意外状况的威胁。在这种情况下,为了确保机组设备的安全,系统须先启动收桨动作使风机减速停转,然后让叶片的桨距角回到零位,消除叶片对轮毂产生的气动转矩,才能断电停机,这个过程通常为几十秒。

KEBA+LTI | PITCHmaster II+
值得注意的是,上述这样的安全功能通常是集成在驱动器内部的,其目的在于让“收桨”动作可以不借助上位控制器由伺服驱动自主完成;不仅如此,为了让风机即使在供电异常的情况下也能够将桨叶收回到安全位置,变桨用伺服产品一般都会配有备用(直流)电源输入端口;另外,上面提到的使用辅助编码器准确的测量风叶桨距角,对于安全停机也是至关重要的。

KEBA + LTI | PitchOne
这其实还是可靠性的意思。目前主流厂家的产品,如:KEBA+LTI 的 PITCHmaster II+ 和新款 PitchOne,在这方面都已经具备了 2oo3 的冗余性能和 PL D 甚至 PL E 的安全等级。

PicSource | KEBA+LTI
从应对严苛的气候地理条件和持续振动的工作环境,到处理实时同步操作、测量角度位置反馈、实施安全控制策略…等,我们不难看出,在全生命周期都具备极度严格的可靠性,是风电变桨伺服区别于通用型伺服产品的关键所在。它不仅应确保风机在日常发电过程中长期稳定的无故障运行,还必须能在遇到紧急状况时妥善的将桨叶收回到安全位置,从而帮助系统做到安全停机。
PicSource | KEBA+LTI
毕竟,风场往往处在偏远的内陆、沿海地区或海上,而变桨伺服又总是运行在几十甚至上百米高的风机轮毂中,运营维护的难度和成本都相当之高,且任何小小的意外都有可能会带来不可估量的损失。

评论区已关闭。